cGAN:条件 GAN
Conditional Generative Adversarial Nets
Mirza M , Osindero S .Conditional Generative Adversarial Nets[J].Computer Science, 2014:2672-2680.DOI:10.48550/arXiv.1411.1784.
Image-to-Image Translation with Conditional Adversarial Networks
Isola P , Zhu J Y , Zhou T ,et al.Image-to-Image Translation with Conditional Adversarial Networks[C]//IEEE Conference on Computer Vision & Pattern Recognition.IEEE, 2016.DOI:10.1109/CVPR.2017.632.
cGAN
条件生成对抗网络(Conditional Generative Adversarial Networks, cGAN)是生成对抗网络(GAN)的一种扩展形式,通过引入 条件信息(如标签、文本、图像等),使生成器和判别器能够根据特定条件生成或判别数据。
- 核心思想是通过条件约束,控制生成内容的属性和结构,从而解决普通 GAN 生成结果不可控的问题。
cGAN 的核心原理
条件信息的引入:
- 生成器(Generator):输入不仅包含随机噪声 $z$,还包括条件信息 $c$(如类别标签、另一张图像等)。生成器需根据 $c$ 生成对应的数据 $G(z|c)$。
- 判别器(Discriminator):输入包含真实数据 $x$ 或生成数据 $G(z|c)$,同时结合条件信息 $c$。判别器的任务是判断数据是否真实且与条件匹配,即 $D(x|c)$ 或 $D(G(z|c)|c)$。
cGAN 的损失函数在普通 GAN 的基础上加入了条件约束:
$$ \mathcal{L}_{cGAN}(G,D) = \mathbb{E}_{x,c}[\log D(x|c)] + \mathbb{E}_{z,c}[\log(1 - D(G(z|c)|c)]] $$- 生成器 $G$ 的目标:生成与条件 $c$ 匹配的逼真数据,使 $D(G(z|c)|c)$ 趋近于1。
- 判别器 $D$ 的目标:区分真实数据 $x|c$ 和生成数据 $G(z|c)|c$。
cGAN 对比普通 GAN
| 特性 | 普通GAN | 条件GAN(cGAN) |
|---|---|---|
| 输入 | 随机噪声 $z$ | 随机噪声 $z$ + 条件信息 $c$ |
| 生成控制 | 完全随机 | 通过条件 $c$ 控制生成内容 |
| 应用场景 | 无约束生成(如随机图像生成) | 需特定条件生成(如根据文本生成图像) |
| 典型任务 | 生成随机人脸、艺术品 | 图像到图像转换(pix2pix)、文本到图像生成、可控生成(如风格迁移)、图像修复、图像翻译(如黑白→彩色) |
代码示例
# 生成器(U-Net结构为例)
class Generator(nn.Module):
def __init__(self):
super().__init__()
# 输入:噪声z + 条件图像c
self.encoder = Encoder() # 下采样层
self.decoder = Decoder() # 上采样层(含跳跃连接)
def forward(self, z, c):
x = torch.cat([z, c], dim=1) # 拼接噪声和条件
return self.decoder(self.encoder(x))
# 判别器(PatchGAN结构为例)
class Discriminator(nn.Module):
def __init__(self):
super().__init__()
# 输入:真实/生成图像 + 条件图像c
self.conv_blocks = nn.Sequential(
nn.Conv2d(3 + 3, 64, kernel_size=4, stride=2), # 假设条件c是3通道图像
nn.LeakyReLU(0.2),
# 更多卷积层...
)
def forward(self, x, c):
x = torch.cat([x, c], dim=1) # 拼接图像和条件
return self.conv_blocks(x)
Image-to-Image Translation with cGAN
本文提出使用条件 GANs 作为通用解决方案,通过对抗训练自动学习任务相关的损失函数,避免人工设计损失函数的复杂性。
条件生成对抗网络(Conditional Generative Adversarial Networks, cGANs)最初由 Mehdi Mirza 和 Simon Osindero 在 2014 年的论文 《Conditional Generative Adversarial Nets》 中提出。这篇论文首次将条件信息(如类别标签或辅助数据)引入 GAN 框架,使生成器和判别器能够基于特定条件进行训练和生成。
条件 GANs 的优势:
- 条件输入:生成器和判别器均以输入图像为条件,确保输出与输入的结构对齐(如下图输入边缘图生成对应照片案例中,生成器和判别器都观察输入的边缘)。
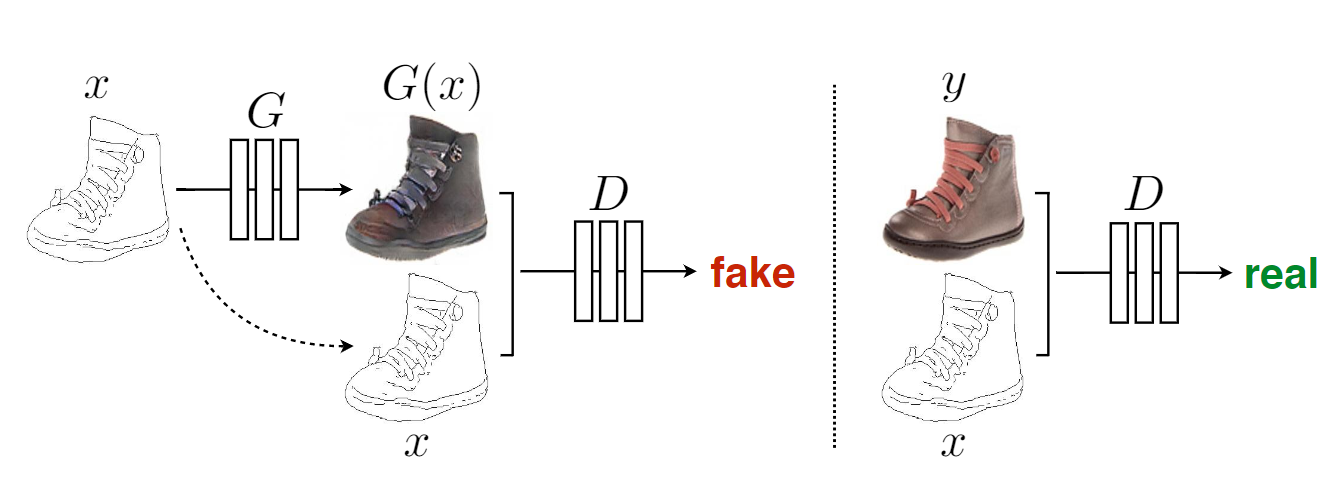
- 结合L1损失:在对抗损失基础上引入 L1 损失,保留低频信息(如整体布局),而对抗损失负责高频细节(如纹理和锐度),解决传统 L2 损失导致的模糊问题。
方法细节
目标函数
cGAN 的目标可以表示为:
$$ \mathcal{L}_{cGAN}(G,D) = \mathbb{E}_{x,c}[\log D(x|c)] + \mathbb{E}_{z,c}[\log(1 - D(G(z|c)|c)]] $$目标函数上,总损失函数为对抗损失与 L1 损失的加权和:
$$ G^* = \arg\min_G \max_D \mathcal{L}_{cGAN}(G, D) + \lambda \mathcal{L}_{L1}(G) $$- 对抗损失:迫使生成器输出逼真的图像,判别器区分生成图像与真实图像。
- L1 损失:约束生成图像与真实图像在像素级的一致性,减少模糊(所以不使用 L2 损失)。
随机性的引入:生成器的输入包含随机噪声(通过 Dropout 实现),但实验表明生成结果仍具有较低随机性。这表明当前方法在建模条件分布的多样性方面仍有改进空间。
网络架构
在网络架构上:
- 生成器:带跳跃连接。
- 判别器(马尔可夫随机场):PatchGAN,尝试对图像中的每个 N × N 块进行真假分类。在图像上卷积运行这个鉴别器,平均所有响应来提供 D 的最终输出。
训练与推演过程
训练中:
- 遵循 GAN 中的优化算法,交替 $D$ 和 $G$ 的 step 训练。
- 在优化 $D$ 时将目标函数除以 2,减慢 $D$ 相对于 $G$ 学习的速率。
- 使用小批量 SGD 并应用 Adam 求解器,学习率为 0.0002,动量参数 $\beta_1 = 0.5$,$\beta_2 = 0.999$。
推演时:
- 与训练阶段相同的方式运行生成器。
实验与验证
论文的第四部分通过广泛的实验验证了条件生成对抗网络(cGAN)在多种图像到图像转换任务中的有效性和通用性.
实验任务与数据集
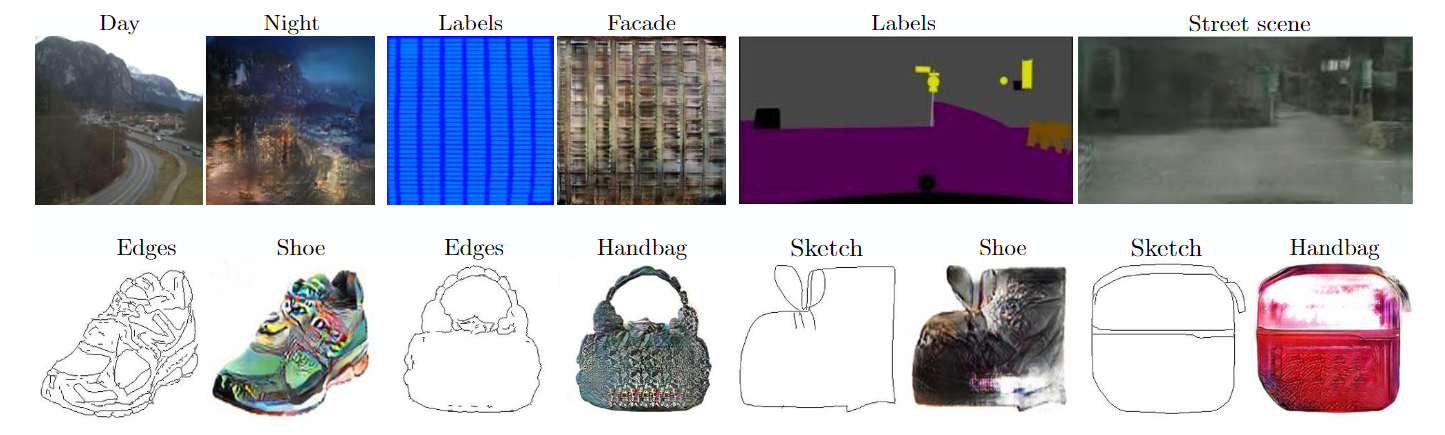
作者在以下任务中测试了框架的通用性,涵盖图形和视觉任务:
- 语义标签 ↔ 照片(Cityscapes数据集):将语义分割标签转换为真实街景照片。
- 建筑标签 → 照片(CMP Facades数据集):将建筑立面线框图转换为真实建筑照片。
- 地图 ↔ 航拍图(Google Maps数据):实现卫星地图与航拍图的双向转换。
- 黑白 → 彩色(ImageNet数据):为灰度图像自动着色。
- 边缘 → 照片(UT Zappos50K、Amazon Handbag数据):从边缘图生成鞋类、手提包等实物图像。
- 草图 → 照片(人类手绘草图):扩展边缘到照片的模型至非结构化输入。
- 白天 → 夜晚(Webcam数据):转换场景光照条件。
- 热成像 → 彩色照片(多光谱行人检测数据集):融合热成像与可见光信息。
- 图像修复(Paris StreetView数据集):补全图像中缺失的像素区域。
每个任务均使用相同架构(U-Net 生成器 + PatchGAN 判别器)和损失函数(L1 + cGAN),仅更换训练数据。跳转链接
数据需求与训练效率
小数据集表现:
- 建筑标签任务仅需400张图像,训练时间不到2小时(单块Titan X GPU)。
- 昼夜转换任务使用91个摄像头的图像,训练17个周期即收敛。
推理速度:
- 所有模型在GPU上运行时间均小于1秒,支持实时应用。
评估方法
(1) AMT 感知实验
- 设计:通过 Amazon Mechanical Turk 平台进行“真实 vs. 生成”的二选一测试,参与者需在 1 秒内观察图像后判断真伪。
- 结果:
- 地图→航拍图任务中,18.9%的生成图像被误认为真实(显著优于L1基线)。
- 航拍图→地图任务中,生成图像仅6.1%被误判(与L1基线无显著差异),因地图的几何结构更易暴露细节错误。
(2) FCN-score
- 设计:使用预训练的FCN-8s模型(在Cityscapes上训练)对生成图像进行语义分割,计算分割精度(像素准确率、类别准确率、IoU)。
- 意义:衡量生成图像是否保留了输入标签的语义结构。
- 关键结果:
- L1 + cGAN 组合在Cityscapes任务中取得最高分数(像素准确率66%,接近真实数据的80%)。
- 单独使用 L1 损失会导致模糊,单独使用cGAN则可能生成结构错误但逼真的图像。
目标函数分析
通过消融实验验证各损失组件的贡献:
- L1 损失:强制像素级匹配,减少模糊但导致色彩单调。
- cGAN 损失:提升图像逼真性和高频细节(如边缘锐利、色彩丰富),但可能引入结构错误。
- L1 + cGAN:结合二者优势,在逼真性和结构准确性间取得平衡。
生成器架构分析
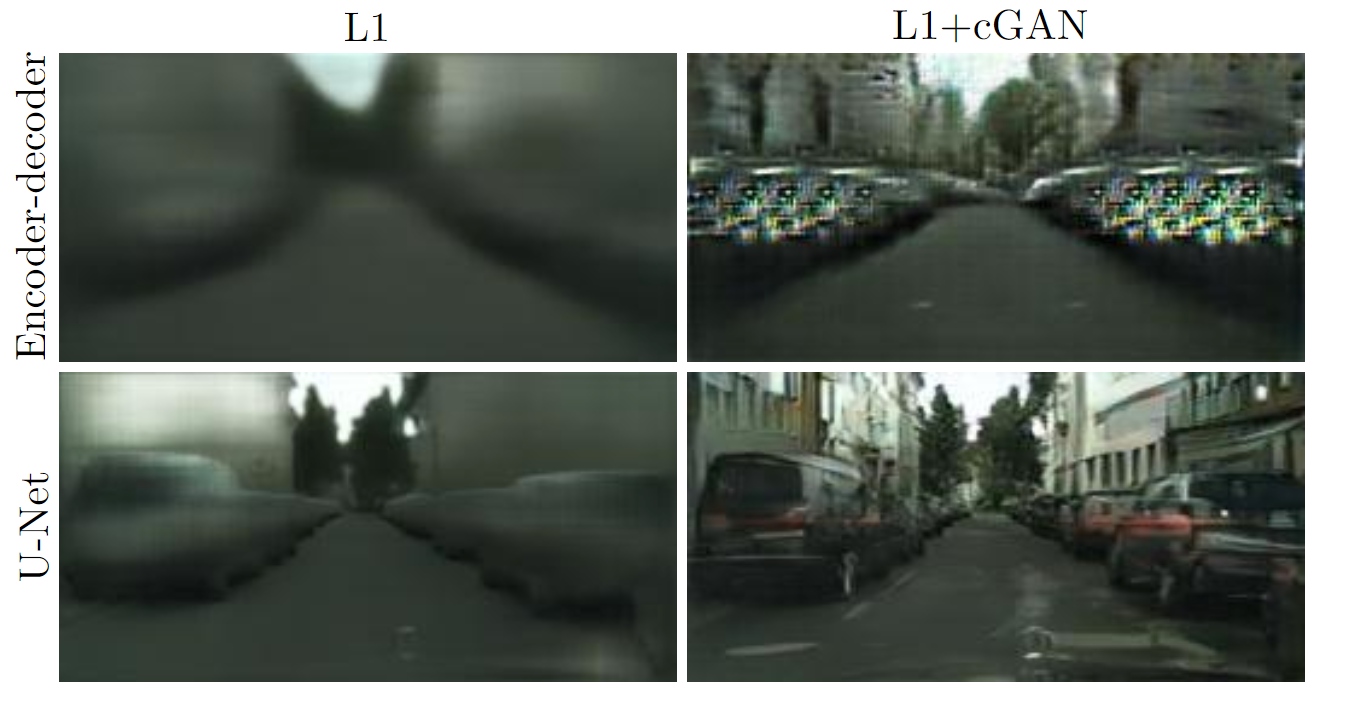
- U-Net vs. 编码器-解码器:
- U-Net 通过跳跃连接保留低级特征(如边缘位置),在图像着色等任务中显著优于普通编码器-解码器。
- 即使仅用 L1 损失训练,U-Net 仍优于编码器-解码器,证明跳跃连接对信息传递的关键作用。
PatchGAN 尺寸分析

Patch 大小的影响。对于不同的损失函数,输出中的不确定性表现不同。在 L1 下,不确定区域变得模糊和去饱和。1x1 PixelGAN 鼓励更大的色彩多样性,但对空间统计没有影响。16x16 PatchGAN 创建了局部清晰的结果,但也导致了超出其可观察范围的平铺伪影。70×70 PatchGAN强制输出在空间和光谱(色彩)维度上都是清晰的,即使不正确。完整的 286×286 ImageGAN 生成的结果在视觉上与 70×70 PatchGAN 相似,但根据FCN评分指标,质量略低。请参阅 https://phillipi.github.io/pix2pix/ 了解更多示例。
测试不同感受野的判别器:
- 1×1 PixelGAN:仅提升色彩多样性,对空间结构无影响。
- 16×16 PatchGAN:生成局部锐利图像,但出现拼贴伪影。
- 70×70 PatchGAN:最佳平衡,生成全局一致且细节清晰的图像。
- 286×286 ImageGAN(全图判别器):参数量大、训练困难,且 FCN-score 下降。
全卷积扩展性测试
PatchGAN 固定大小的 Patch 可以应用于任意大的图像。如在 256×256 分辨率训练生成器,直接应用于 512×512 图像。结果是生成高分辨率图像时仍保持质量,证明框架的扩展性。
语义分割任务
实验设计:将 cGAN 应用于照片→语义标签的逆任务。
结果:
- 仅用 cGAN(无L1)可生成粗略标签,但准确率低于 L1 回归。
- 作者认为,结构化输出任务(如分割)因目标明确,更适合传统回归损失。
失败案例分析
每对图像中,左侧为输入,右侧为输出。
常见问题:
- 输入稀疏或异常时,生成器产生伪影(如缺失边缘的区域)。
- 对非常规输入(如抽象草图)的泛化能力有限。
pix2pix 代码示例
class Pix2PixModel(BaseModel):
# ... 省略 ...
def __init__(self, opt):
BaseModel.__init__(self, opt)
# 指定要打印的训练损失。训练/测试脚本将调用<BaseModel.get_current_losses>
self.loss_names = ['G_GAN', 'G_L1', 'D_real', 'D_fake']
# 指定要保存/显示的图像。训练/测试脚本将调用<BaseModel.get_current_visuals>
self.visual_names = ['real_A', 'fake_B', 'real_B']
# 指定要保存到磁盘的模型。训练/测试脚本将调用<BaseModel.save_networks>和<BaseModel.load_networks>
if self.isTrain:
self.model_names = ['G', 'D']
else: # 在测试期间,只加载G
self.model_names = ['G']
# 定义网络(生成器和鉴别器)
self.netG = networks.define_G(opt.input_nc, opt.output_nc, opt.ngf, opt.netG, opt.norm,
not opt.no_dropout, opt.init_type, opt.init_gain, self.gpu_ids)
if self.isTrain:
# 定义一个鉴别器;条件gan需要同时获取输入和输出图像;因此,D 的 channels = input_nc + output_nc
self.netD = networks.define_D(opt.input_nc + opt.output_nc, opt.ndf, opt.netD,
opt.n_layers_D, opt.norm, opt.init_type, opt.init_gain, self.gpu_ids)
if self.isTrain:
# 定义损失函数
self.criterionGAN = networks.GANLoss(opt.gan_mode).to(self.device)
self.criterionL1 = torch.nn.L1Loss()
# 初始化优化器;优化器将由函数自动创建<BaseModel.setup>。
self.optimizer_G = torch.optim.Adam(self.netG.parameters(), lr=opt.lr, betas=(opt.beta1, 0.999))
self.optimizer_D = torch.optim.Adam(self.netD.parameters(), lr=opt.lr, betas=(opt.beta1, 0.999))
self.optimizers.append(self.optimizer_G)
self.optimizers.append(self.optimizer_D)
# ... 省略 ...
def forward(self):
self.fake_B = self.netG(self.real_A) # G(A)
判别器的反向传播(backward_D)
生成假样本输入判别器
- 生成器生成假图像
fake_B,将其与输入图像real_A拼接为fake_AB。 - 通过
fake_AB.detach()切断梯度回传,防止生成器参数在判别器训练时被更新。 - 判别器对假样本的预测结果
pred_fake与标签False计算损失loss_D_fake。
- 生成器生成假图像
处理真实样本
- 将真实图像对
real_A和real_B拼接为real_AB。 - 判别器对真实样本的预测结果
pred_real与标签True计算损失loss_D_real。
- 将真实图像对
计算总损失并反向传播
- 总损失为真假样本损失的平均值:$\text{loss}_{\text{D}} = (\text{loss}_{\text{D_fake}} + \text{loss}_{\text{D_real}}) / 2$
- 执行
loss_D.backward()计算梯度,通过optimizer_D.step()更新判别器参数。
def backward_D(self):
"""计算鉴别器的 GAN 损失"""
# Fake;通过分离 fake_B 来停止对生成器的反向传播
# 使用条件 GAN,需要将输入和输出都提供给网络
fake_AB = torch.cat((self.real_A, self.fake_B), 1)
pred_fake = self.netD(fake_AB.detach())
self.loss_D_fake = self.criterionGAN(pred_fake, False)
# Real
real_AB = torch.cat((self.real_A, self.real_B), 1)
pred_real = self.netD(real_AB)
self.loss_D_real = self.criterionGAN(pred_real, True)
# 结合损失和计算梯度
self.loss_D = (self.loss_D_fake + self.loss_D_real) * 0.5
self.loss_D.backward()
生成器的反向传播(backward_G)
对抗损失(GAN Loss)
- 将生成的假图像
fake_B与输入图像real_A拼接为fake_AB,输入判别器得到预测结果pred_fake。 - 计算对抗损失
loss_G_GAN,目标是让判别器认为生成的图像为真(标签True)。
- 将生成的假图像
L1 重建损失
- 计算生成图像
fake_B与真实图像real_B的像素级 L1 损失loss_G_L1,乘以权重系数lambda_L1(通过opt.lambda_L1控制)。
- 计算生成图像
计算总损失并反向传播
- 总损失为对抗损失与L1损失之和:$\text{loss}_{\text{G}} = \text{loss}_{\text{G_GAN}} + \text{loss}_{\text{G_L1}}$
- 执行
loss_G.backward()计算梯度,通过optimizer_G.step()更新生成器参数。
def backward_G(self):
"""计算生成器的 GAN 和 L1 损失"""
# 1. G(A) 应该骗过判别器
fake_AB = torch.cat((self.real_A, self.fake_B), 1)
pred_fake = self.netD(fake_AB)
self.loss_G_GAN = self.criterionGAN(pred_fake, True)
# 2. G(A) = B
self.loss_G_L1 = self.criterionL1(self.fake_B, self.real_B) * self.opt.lambda_L1
# 结合损失并计算梯度
self.loss_G = self.loss_G_GAN + self.loss_G_L1
self.loss_G.backward()
训练流程(optimize_parameters)
前向传播生成假图像:
self.forward()调用生成器生成fake_B。更新判别器:
- 解冻判别器参数(
set_requires_grad(self.netD, True))。 - 清零梯度(
optimizer_D.zero_grad())。 - 计算判别器损失并反向传播(
backward_D())。 - 更新参数(
optimizer_D.step())。
- 解冻判别器参数(
更新生成器:
- 冻结判别器参数(
set_requires_grad(self.netD, False))。 - 清零梯度(
optimizer_G.zero_grad())。 - 计算生成器损失并反向传播(
backward_G())。 - 更新参数(
optimizer_G.step())。
- 冻结判别器参数(
def optimize_parameters(self):
self.forward() # 计算生成器生成的假图像: G(A)
# 更新 D
self.set_requires_grad(self.netD, True) # 启用 D 的反向传播
self.optimizer_D.zero_grad()
self.backward_D()
self.optimizer_D.step()
# 更新 G
self.set_requires_grad(self.netD, False) # D 在更新 G 时不需要梯度
self.optimizer_G.zero_grad()
self.backward_G()
self.optimizer_G.step()
局限性与启示
- 随机性不足:生成结果偏向确定性,难以建模多模态输出(如同一输入对应多种合理输出)。
- 复杂任务表现:在高度结构化任务(如语义分割)中,cGANs 效果不及纯 L1 回归,表明对抗训练更适用于需细节生成的图形任务。
- 社区应用:开源代码(pix2pix)被广泛用于艺术创作(如草图转肖像、背景去除),验证了其易用性和扩展性。